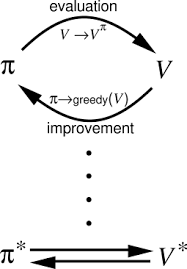
Policy iteration, first introduced in the 1950s by Richard Bellman and refined by Andrew Barto and Richard Sutton, is a fundamental method in Reinforcement Learning for optimising decision-making strategies. By iteratively evaluating and improving policies, it ensures efficient and adaptive solutions for complex sequential decision problems.